Hello Sumeryamaner,
thanks for your help. I've spent a lot of time on this but I am unfortunately slightly flummoxed - It isn't working and I'm wondering what I'm doing wrong.
I think I know what I've done wrong and that is the coding - I've got PB0, PB2 as outputs and when I test them seperately I can make them flash LED bulbs ; ) but I couldn't work out how to code in the ADC3 input:
Basically I've just made a blinking lights code and couldn't work out the coding that you suggested.
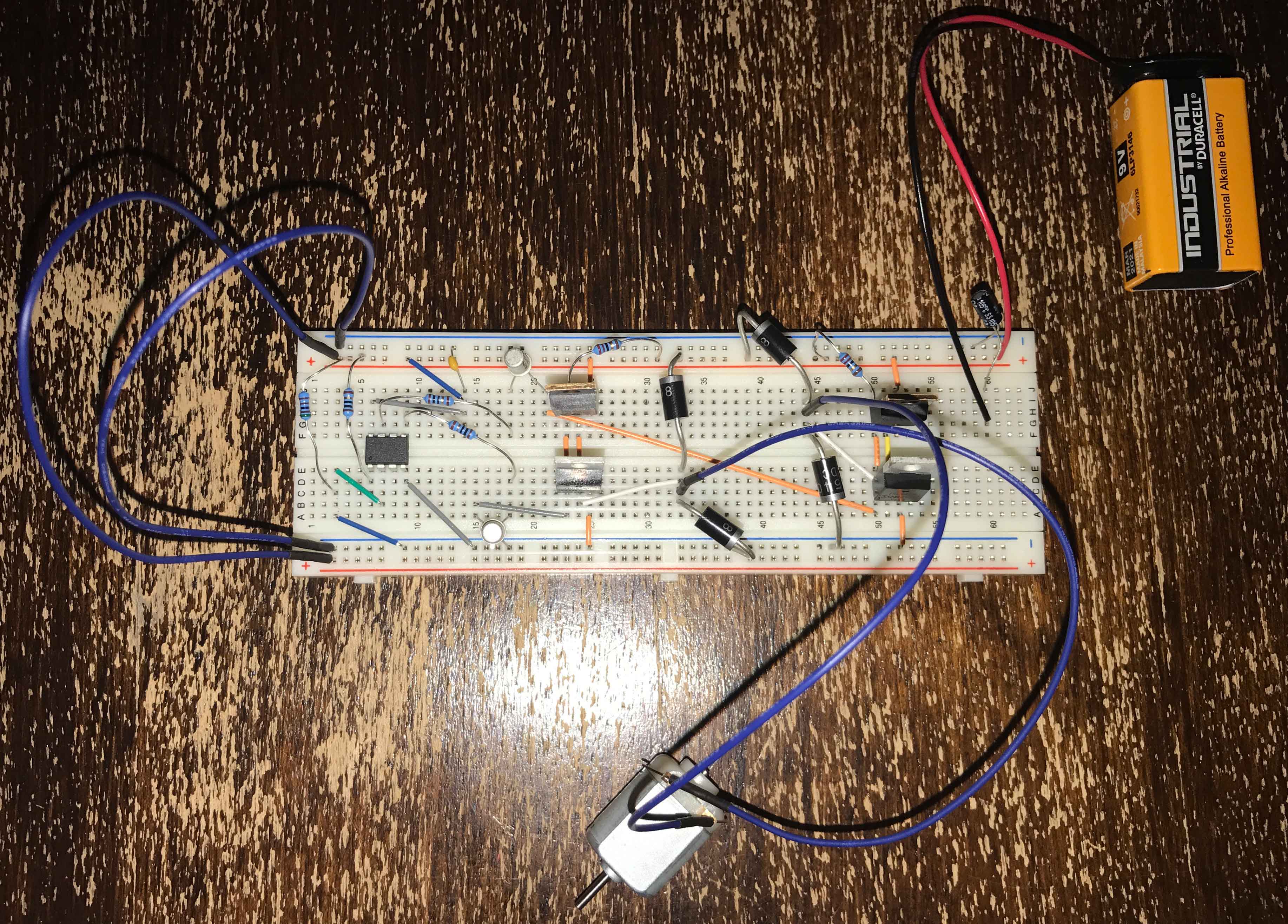
This is the breadboard I built (I think quite faithfully to what you suggested):
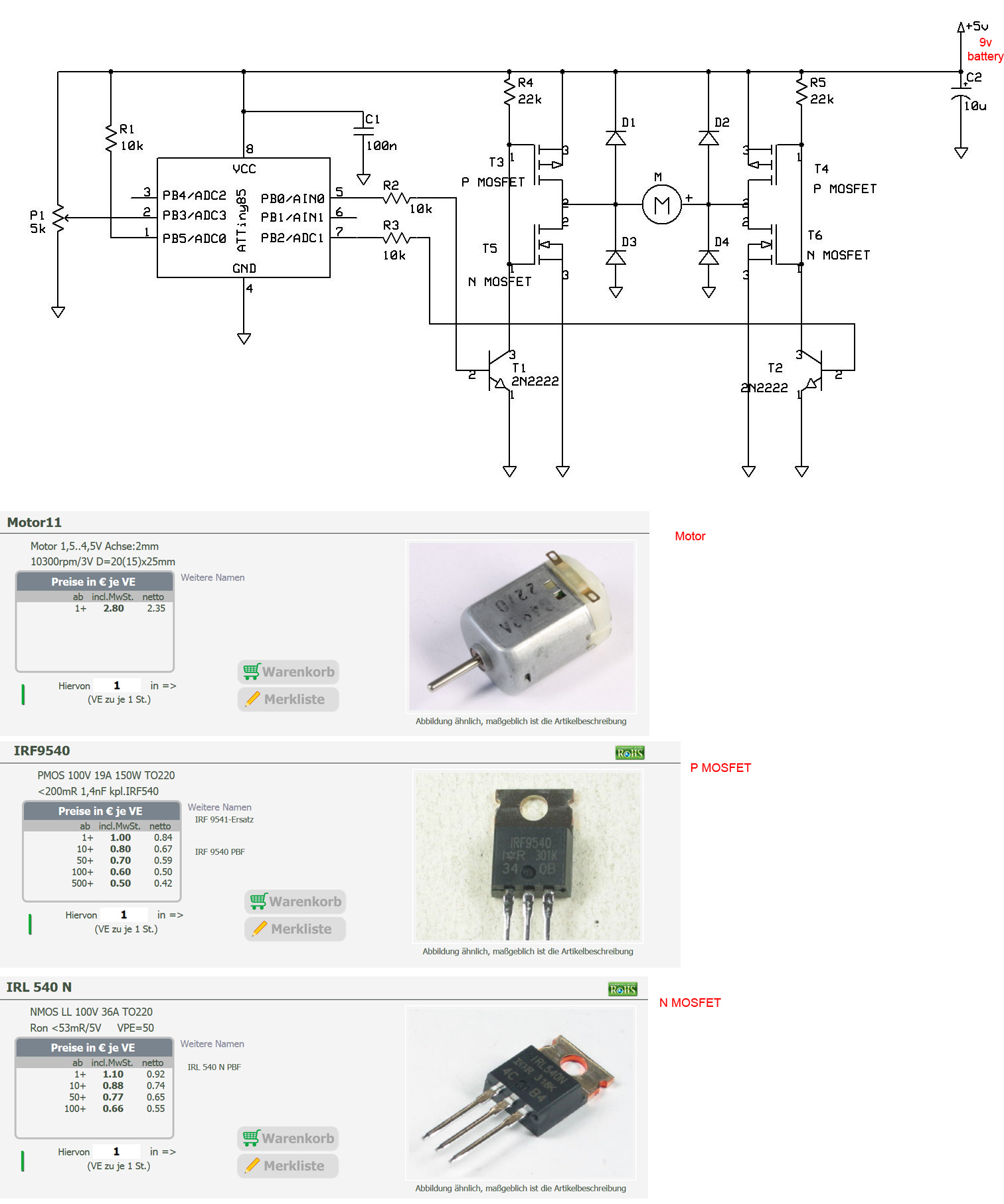
I was a bit of a fool in my original description, I said 5 volt power source - I meant 9V.
Here is your schematic again with info about the motor and the Mosfets that I used:
Can you see where I am going wrong (if it isn't the coding - which I am sure is the problem)? And if you can, could you help me and tell me how to fix it?
Many, many thanks in advance!
Kind regards,
Euan
") )
)