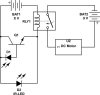
I am trying to build a robot which stops when it detects the edge of a table it's moving on without ic's or a arduino. It consists of a photodiode, when the ir rays emitted from an ir led reflects from the surface to the Photodiode (which is connected in reverse bias from the positive of the battery to the base of a npn transistor) the transistor becomes open, in series with the transistor is a 6v relay coil the relay is used as a switch to on and off the motor this way the motor only spins when the ir is reflected from a surface and will stop when it comes to the edge. The motor requires about 5 or 6 AA batteries in series to work. Currently I can't get it to work. The motor doesn't spin when in the circuit but it spins when I hook it up directly to the battery without the relay. This is because the relay is not switching to close the motor circuit maybe because it's not getting the 6 V it requires. Please help I want to know what batteries to use and the resistors or any other parts required to make it work. Also should I hook up the motor directly in the circuit in series with the transistor or is the relay required and should I connect the Ir led in series with the circuit? Also please suggest if I have to change this circuit in any way.
-
Categories
-
Platforms
-
Content