Hey everyone, first time poster here! 
I am currently in the midst of a 1st year Electrical Engineering assignment. It is a team assignment and the goal is to develop a small scale autonomous car. One of its main functions is the ability to detect the speed zone it is in and change it's speed accordingly.
Here is an exert of how the speed limit is broadcast:
"The speed limit signs will transmit this speed using pulsed Infra-red, on a carrier frequency of 38kHz using on-off keying (the binary state of 0 means no signal, while 1 means maximum carrier amplitude – see Figure 8).The speed value will be transmitted at 1kbps, in a format shown in Figure 7. The signal is repeated, with 8ms of off-air time and 8ms on-air time. This 8ms of on-air times consists of an 8-bit code, with the first five bits being a pre-amble, 10100, and the final three bits containing the speed encoded in binary (plus one, so that 000 = 1cm/s and 111 = 8cm/s)."
So what have I done so far?
Not much
I am using an Arduino Uno and so far I have bought an IR Receiver and checked that it is working using this Test.
On top of that I have read through this article and have successfully run this example using my TV remote.
I have also played around with a few IR Libraries which print a hexadecimal value for the buttons I press on the remote.
What I am having trouble with is how to interpret the output of the Ir Receiver. It looks a bit like binary but outputs of running the above Example are really confusing me.
If anyone could explain how to interpret the output or link me to a quality resource I could read to further my understanding I would really appreciate it. I am quite lost at the moment.
I am currently in the midst of a 1st year Electrical Engineering assignment. It is a team assignment and the goal is to develop a small scale autonomous car. One of its main functions is the ability to detect the speed zone it is in and change it's speed accordingly.
Here is an exert of how the speed limit is broadcast:
"The speed limit signs will transmit this speed using pulsed Infra-red, on a carrier frequency of 38kHz using on-off keying (the binary state of 0 means no signal, while 1 means maximum carrier amplitude – see Figure 8).The speed value will be transmitted at 1kbps, in a format shown in Figure 7. The signal is repeated, with 8ms of off-air time and 8ms on-air time. This 8ms of on-air times consists of an 8-bit code, with the first five bits being a pre-amble, 10100, and the final three bits containing the speed encoded in binary (plus one, so that 000 = 1cm/s and 111 = 8cm/s)."
Figure 7:
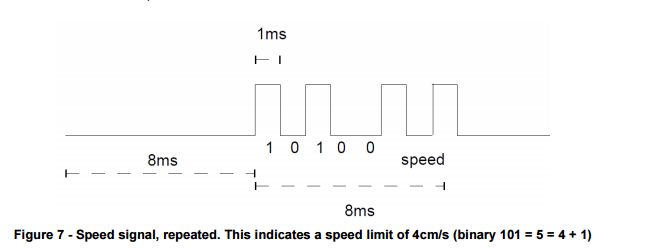
Figure 8:
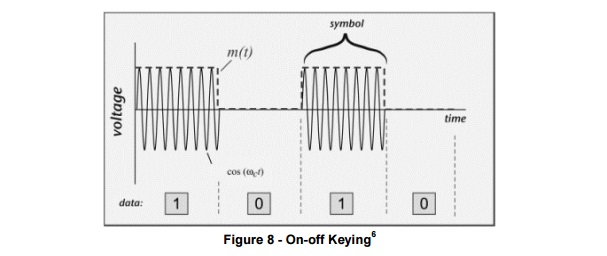
Figure 8:
So what have I done so far?
Not much
I am using an Arduino Uno and so far I have bought an IR Receiver and checked that it is working using this Test.
On top of that I have read through this article and have successfully run this example using my TV remote.
I have also played around with a few IR Libraries which print a hexadecimal value for the buttons I press on the remote.
What I am having trouble with is how to interpret the output of the Ir Receiver. It looks a bit like binary but outputs of running the above Example are really confusing me.
If anyone could explain how to interpret the output or link me to a quality resource I could read to further my understanding I would really appreciate it. I am quite lost at the moment.