Can someone please help explain to me how this circuit works? I am pretty sure I understand how the voltage divider network works. I am pretty sure I understand how the H-bridge works.
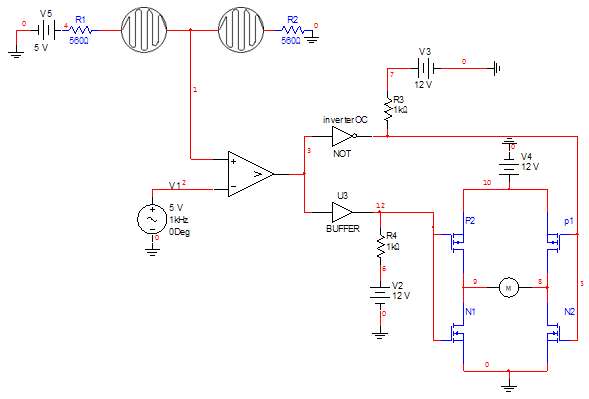
What I do not seem to grasp is how they use PWM in this schematic to turn the motor at slower speeds in both directions??? If you have a voltage of 2.5V going to the the non-inverting side of a comparator chip and on the inverting side you provide a triangle wave with 5V pk 50% duty cycle, then the output of the comparator is going to be a 50% duty cycle square wave, which as far as I can tell will only turn the motor forward and reverse at equal intervals and full speed. To me this whole design doesn't make any sense once they add PWM to the schematic.
http://www.sccs.swarthmore.edu/users/06/adem/engin/e72/lab7/
Can anyone put this into layman's terms so I can see what I am not grasping about this very simple design. Only thing I can guess is that I should maybe be using a op-amp instead of a comparator IC. Using the op-amp in a comparator configuration, then I suppose that would either make the output a positive voltage or a negative voltage with a certain duty cycle(the more I think about it, the less this even makes sense). I am so confused, just need some clarification.
Another thing I do not understand is if you look at the webpage, in the original schematic they connect both sides of the H-bridge to the output of the comparator. To me this would seem like the H-bridge would short-circuit and blow the MOSFETS. It wasn't until the second schematic that they added in an inverter to change the one side of the H-bridge to be opposite signaling of the opposing side. I don't see how this could work WITHOUT the inverter.
Last edited:
