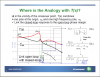
The plot shows the loop gain (magnitude and phase).
The stability criterion requires to determine the phase difference between the actual loop phase at the "cross-over frequency" (magnitude 0dB) and zero phase. This difference must be positive (for a stable closed-loop) and, hence , is called "phase margin (phi)m".
The open-loop response - and, in particular, the phase margin determine the closed-loop response (magnitude peaking) in the "critical" area (around the cross.over frequency). This magnitude peaking is related to the Q factor (pole quality). This Q factor is defined in the denominator of the last equation .
The angular frequencies wo and w2 can also be derived from the plot.
EDIT: The whole plot is misleading. The same plot was used on page 9 of the contribution for explaining phase and gain margin. That`s OK. And now - the same plot was used in conjunction with given functions for open and closed-loop gains. This is misleading because the shown plot does NOT belong to a simple 2nd order function with real poles only (as given with the function).
So - what is the problem to be solved?