//****************************************************************//
// Tico - Tic-Tac-Toe playing robot
// Tico is an open source 3D printed robot designed by PlayRobotics
// Tico was designed in order to inspire kids to learn coding while teaching Tico to play Tic-Tac-Toe
// Full documentation can be found here: https://playrobotics.com/blog/tico-tic-tac-toe-arduino-robot-documentation
// Attribution: Parts of this code are based on the popular Plotclock by Joo (https://www.thingiverse.com/thing:248009)
//****************************************************************//
//Should playro draw the move made by the human, or the human will draw it himself?
#define DRAW_HUMAN_MOVE false
//If you don't have a remote control or IR receiver you can enable serial monitor instead
//When using serial monitor please choose 'No line ending' from the dropdown next to the boundrate instead of 'new line'
#define SERIAL_MONITOR_MODE true
// Include libraries
#include <Wire.h>
#include <Servo.h>
#include <IRremote.h>
#include <Adafruit_GFX.h> // Core graphics library
#include <Adafruit_ST7735.h> // Hardware-specific library for ST7735
#include <SPI.h>
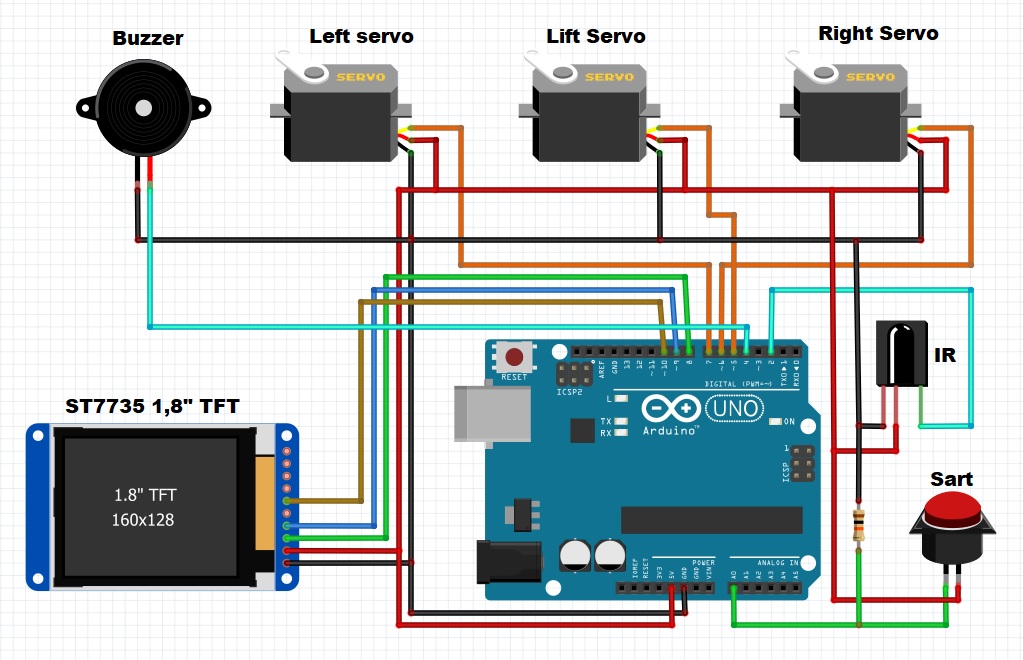
// Servo pins
const int LEFT_SERVO_PIN = 7;
const int RIGHT_SERVO_PIN = 6;
const int LIFT_SERO_PIN = 5;
Servo servo_lift;
Servo servo_left;
Servo servo_right;
//LCD Pins
#define TFT_CS 10
#define TFT_RST 8 // Or set to -1 and connect to Arduino RESET pin
#define TFT_DC 9
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
// Lift servo calibration
// *** If the pen is not touching the board, this is the value you should play with ***
const int Z_OFFSET = 395; // Lower value will lift the pen higher
//*** Other servo configurations, usually you will not need to touch those
int servoLift = 1500;
const int LIFT0 = 1110 + Z_OFFSET; // On drawing surface
const int LIFT1 = 925 + Z_OFFSET; // Between numbers
const int LIFT2 = 735 + Z_OFFSET; // Going towards sweeper
const int LIFT_SPEED = 1000; // Speed of liftimg arm, lower number will increase speed.
// Side servos calibration
const int SERVO_LEFT_FACTOR = 690;
const int SERVO_RIGHT_FACTOR = 690;
// Zero-position
const int SERVO_LEFT_NULL = 1950;
const int SERVO_RIGHT_NULL = 815;
// Length of arms
const float L1 = 35;
const float L2 = 55.1;
const float L3 = 13.2;
const float L4 = 45;
// Origin points of left and right servos.
const int O1X = 24;
const int O1Y = -25;
const int O2X = 49;
const int O2Y = -25;
// Home coordinates, where the eraser is.
const volatile double ERASER_X = -11;
const volatile double ERASER_Y = 45.5;
volatile double lastX = ERASER_X; // 75;
volatile double lastY = ERASER_Y; // 47.5;
//We will be using an array that will hold the current state of all our game cells
// -1-> Empty cell
// 0 -> 0
// 1 -> X
int board_values[] = { -1, -1, -1, -1, -1, -1, -1, -1, -1};
int empty_places = 9;
int winner = -1;
void setup()
{
Serial.begin(9600);
//LCD Setup and clear
tft.initR(INITR_BLACKTAB);
tft.fillScreen(ST77XX_BLACK);
//Play sound on start
tone(4,3000,250);
delay(250);
tone(4,400,250);
delay(250);
tone(4,3000,250);
delay(250);
//Draw blinking eyes animation
tft.fillCircle(30, 50, 25, ST77XX_BLUE);
tft.fillCircle(95, 50, 25, ST77XX_BLUE);
delay(500);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(500);
tft.fillCircle(30, 50, 15, ST77XX_BLUE);
//tft.fillCircle(95, 50, 15, ST77XX_BLUE);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
//tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(250);
//tft.fillCircle(30, 50, 25, ST77XX_BLUE);
tft.fillCircle(95, 50, 25, ST77XX_BLUE);
delay(250);
//tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLUE);
tft.fillCircle(95, 50, 15, ST77XX_BLUE);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(1000);
tft.setCursor(0, 0);
tft.setTextColor(ST77XX_WHITE);
tft.setTextSize(2);
tft.setTextWrap(true);
tft.setCursor(30, 90);
tft.setTextColor(ST77XX_BLUE );
tft.setTextSize(3);
tft.print("I'M");
tft.setCursor(30, 120);
tft.print("TICO");
//Play sound when LCD says "I'M Tico"
tone(4,400,250);
delay(250);
tone(4,3000,250);
delay(250);
delay(500);
//Setup IR reciver on Pin 2
IrReceiver.begin(2);
//This is needed because we want different random number every time Arduino is reastrted
randomSeed(analogRead(A2));
pinMode(4, OUTPUT);
pinMode(A0, INPUT_PULLUP);
}
void loop()
{
// Draw "Click Start" message
tft.setCursor(30, 100);
tft.fillRect(0,90,130,100,ST77XX_BLACK);
tft.setTextColor(ST77XX_YELLOW );
tft.setCursor(20, 90);
tft.print("Click");
tft.setCursor(20, 120);
tft.print("Start");
tone(4,3000,250);
delay(250);
//The loop will run over and over again until the game is started
//The game can be started using a button or serial monitor if you don't have a button
//SERIAL-MONITOR-MODE setting can be changed in the begning of this code
if (SERIAL_MONITOR_MODE)
{
//Serial monitor start
//Print main menu
Serial.println("--==MAIN MENU==--");
Serial.println("==S== Start Game");
Serial.println("==E== Erase");
Serial.println("==F== Draw Frame");
Serial.println("==H== Go Home");
//We just wait until there is an input
while (Serial.available() == 0) {}
//Get the value user entered
int user_input = Serial.read();
//Ignore the hidden line end character the monitor is adding to the received character
if(user_input != '\n')
{
//React to user input
if ((user_input!='S')&&(user_input!='E')&&(user_input!='F')&&(user_input!='H')&&(user_input!='s')&&(user_input!='e')&&(user_input!='f')&&(user_input!='h'))
Serial.println("====WRONG INPUT====");
else
{
if ((user_input=='H')||(user_input=='h'))
goHome();
else
{
if ((user_input=='E')||(user_input=='e'))
{
erase();
//goHome();
}
else
{
if ((user_input=='F')||(user_input=='f'))
drawFrame();
else
startGame();
}
}
}
}
}
else
{
//Button start
//The following loop will just continue until the button is pressed
int button_value = analogRead(A0);
while(button_value<500)
{
delay(20);
//If you are using a regular button it will also require a pull up resistor
//Alternatively you can use an "Arduino button moudle" that already has a built in resistor
//Another option will be to use Arduin's built in pull-up resistor
button_value = analogRead(A0);
}
startGame();
}
//Reset game variables before next game
//Winner can be: 0 , 1(X) or 2(tie)
winner = -1;
empty_places = 9;
//This array holds all the moves
// 1->empty 0->0 1->X
//Going over it to make it empty
for (int i = 0; i < 9; i++)
board_values[i] = -1;
}
void startGame()
{
Serial.println("====GAME IS ON====");
tone(4,3000,250);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("GAME");
tft.setCursor(20, 115);
tft.print("=IS=");
tft.setCursor(20, 140);
tft.print("=ON= ");
delay(500);
Serial.println("Erasing");
erase();
Serial.println("Drawing Frame");
drawFrame();
delay(1000);
Serial.println("Tico is making the first move");
drawMove(5);
recordMove(5);
//As long as the game is runing we need to repeate this loop
while ((winner == -1) && (empty_places > 0))
{
Serial.println("Human, enter your move(1-9)");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("YOUR");
tft.setCursor(20, 115);
tft.print("MOVE");
int moveTo;
tft.fillCircle(30, 50, 15, ST77XX_RED);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
//This mode can be used to get input from user via monitor instead of remote control
//You can change this setting at the beggining of this code
if (SERIAL_MONITOR_MODE)
{
//Serial monitor mode
//This loop will just wait until there is an input
while (Serial.available() == 0) {}
moveTo = Serial.readString().toInt(); //Reading the Input string and turning it to integer
}
else
{
//IR mode
IrReceiver.enableIRIn();
delay(100);
int code_received = false;
while (!code_received)
{
detachServos();
if (IrReceiver.decode())
{
// Print a short summary of received data
IrReceiver.printIRResultShort(&Serial);
//Mapping of codes sent by the remote control we are using,
//if you are using a different remote control you will need to re-map this
//0x4 ->1
//0x5 ->2
//0x6 ->3
//0x8 ->4
//0x9 ->5
//0xA ->6
//0xC ->7
//0xD ->8
//0xE ->9
IrReceiver.resume(); // Enable receiving of the next value
int message_rec = IrReceiver.decodedIRData.command;
if ((message_rec == 0xC) || (message_rec == 0x18) || (message_rec == 0x5E)
|| (message_rec == 0x8) || (message_rec == 0x1C) || (message_rec == 0x5A)
|| (message_rec == 0x42) || (message_rec == 0x52) || (message_rec == 0x4A))
{
code_received = true;
IrReceiver.disableIRIn();
if (message_rec == 0xC)
moveTo = 1;
if (message_rec == 0x18)
moveTo = 2;
if (message_rec == 0x5E)
moveTo = 3;
if (message_rec == 0x8)
moveTo = 4;
if (message_rec == 0x1C)
moveTo = 5;
if (message_rec == 0x5A)
moveTo = 6;
if (message_rec == 0x42)
moveTo = 7;
if (message_rec == 0x52)
moveTo = 8;
if (message_rec == 0x4A)
moveTo = 9;
}
}
delay(30);
}
}
//***Regardless of the mode that was used(serial / IR)
//we now have the user's move in moveTo variable
//Check if the move value is valid
if ((moveTo > 0) && (moveTo < 10))
{
//Check if this place is still empty
if (board_values[moveTo - 1] == -1)
{
Serial.print("Moving to: ");
Serial.println(moveTo);
//Only draw the move made by the user if this setting is activated
if (DRAW_HUMAN_MOVE)
drawMove(moveTo + 10);
//Even if Tico didn't draw the move he should document it anyway
recordMove(moveTo + 10);
checkWinnerRow (1, 0);
checkWinnerRow (2, 0);
checkWinnerRow (3, 0);
checkWinnerCol (1, 0);
checkWinnerCol (2, 0);
checkWinnerCol (3, 0);
checkWinnerDiag (1, 0);
checkWinnerDiag (2, 0);
if ((winner == -1) && (empty_places > 0))
{
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
tft.setTextColor(ST77XX_WHITE);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("MOVE");
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_YELLOW);
replyMove();
}
checkWinnerRow (1, 1);
checkWinnerRow (2, 1);
checkWinnerRow (3, 1);
checkWinnerCol (1, 1);
checkWinnerCol (2, 1);
checkWinnerCol (3, 1);
checkWinnerDiag (1, 1);
checkWinnerDiag (2, 1);
}
else
{
Serial.println("Already taken!!");
//IrReceiver.disableIRIn();
//delay(100);
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("PLACE");
tft.setCursor(20, 115);
tft.print("TAKEN");
tone(4, 1000, 250);
delay(250);
}
}//End if -> Check if the move value is valid
}//End if -> Check if this place is still empty
goHome();
}
void checkWinnerCol (int col, int player) {
//Row
if ((board_values[(col - 1) * 3] == player) && (board_values[(col - 1) * 3 + 1] == player) && (board_values[(col - 1) * 3 + 2] == player))
{
attachServos();
Serial.println("--== Winner COL==--");
Serial.println(player);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WINS==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(55 - 20 * (4 - col - 1), 10);
//Draw
lift(LIFT0);
drawTo(55 - 20 * (4 - col - 1), 50);
lift(LIFT2);
winner = player;
}
}
void checkWinnerRow (int row, int player) {
//Row
if ((board_values[row - 1] == player) && (board_values[row + 3 - 1] == player) && (board_values[row + 6 - 1] == player))
{
attachServos();
Serial.println("--== Winner ROW==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WINS==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(10, 43 - 14 * (row - 1));
//Draw
lift(LIFT0);
drawTo(60, 43 - 14 * (row - 1));
lift(LIFT2);
winner = player;
}
}
void checkWinnerDiag (int diag, int player) {
attachServos();
//Check which diagonal
if (diag == 1)
{
if ((board_values[1 - 1] == player) && (board_values[5 - 1] == player) && (board_values[9 - 1] == player))
{
Serial.println("--== Winner DIAGONAL 1==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WIN==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(60, 10);
//Draw
lift(LIFT0);
drawTo(15, 45);
lift(LIFT2);
winner = player;
}
}
else
{
if ((board_values[7 - 1] == player) && (board_values[5 - 1] == player) && (board_values[3 - 1] == player))
{
Serial.println("--== Winner DIAGONAL 2==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WIN==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(10, 10);
//Draw
lift(LIFT0);
drawTo(60, 50);
lift(LIFT2);
winner = player;
// or draw the line from other side
/*
drawTo(60, 45);
//Draw
lift(LIFT0);
drawTo(15, 10);
lift(LIFT2);
*/
}
}
}
void replyMove() {
//========= Reply move ======
//We will generate a random number from 1 to the number of empty places
//We will then go over the array and count the empty places we meet until we get to the needed place
//If there are 3 empty places and the trandom number will be 2 , this means we will make a move at the second empty place we find
int randEmptyPlace = random(empty_places) + 1;
//Debugging
/*
Serial.println("============================");
Serial.print("Empty Spaces:");
Serial.println(empty_places);
Serial.print("Replying to randEmptyPlace: ");
Serial.println(randEmptyPlace);
Serial.println("============================");
*/
//Loop until we find an empty place
int emptyPlacesFound = 0;
for (int i = 0; i < 9; i++)
{
if (board_values[i] == -1)
{
//We found an empty place
emptyPlacesFound++;
if (emptyPlacesFound == randEmptyPlace)
{
drawMove(i + 1);
recordMove(i + 1);
Serial.print("Replying to: ");
Serial.println(i + 1);
}
}
}
}
void recordMove(int move)
{
if ((move >= 1) && (move <= 9))
{
board_values[move - 1] = 1;
empty_places--;
}
if ((move >= 11) && (move <= 19))
{
board_values[move - 11] = 0;
empty_places--;
}
}
void drawMove(int move)
{
attachServos();
switch (move) {
case 0:
drawFrame();
break;
case 1:
drawX(15, 40);
break;
case 2:
drawX(15, 25);
break;
case 3:
drawX(15, 10);
break;
case 4:
drawX(30, 40);
break;
case 5:
drawX(30, 25);
break;
case 6:
drawX(30, 15);
break;
case 7:
drawX(50, 40);
break;
case 8:
drawX(50, 25);
break;
case 9:
drawX(50, 10);
break;
case 11:
drawZero(15, 40);
break;
case 12:
drawZero(15, 25);
break;
case 13:
drawZero(15, 10);
break;
case 14:
drawZero(30, 40);
break;
case 15:
drawZero(30, 25);
break;
case 16:
drawZero(30, 10);
break;
case 17:
drawZero(50, 40);
break;
case 18:
drawZero(50, 25);
break;
case 19:
drawZero(50, 10);
break;
case 99:
drawTo(5, 0);
break;
}
//Get out of the way
lift(LIFT2);
drawTo(10, 10);
detachServos();
}
void erase() {
goHome();
attachServos();
lift(LIFT0); // Go down, just before doing the erase movements.
drawTo(70, ERASER_Y);
drawTo(5, ERASER_Y);
drawTo(70, 34);
drawTo(0, 34);
drawTo(70, 34);
drawTo(0, 26);
drawTo(70, 20);
drawTo(0, 20);
drawTo(70, 5);
drawTo(10, 15);
drawTo(40, 30);
drawTo(ERASER_X, ERASER_Y);
lift(LIFT2 - 100);
detachServos();
}
void drawX(float bx, float by) {
bx = bx - 1;
by = by + 1;
//Go
drawTo(bx, by+1);
//Draw
lift(LIFT0);
drawTo(bx + 10, by + 10);
//=====
//Go
lift(LIFT2);
drawTo(bx + 10, by);
//Draw
lift(LIFT0);
drawTo(bx, by + 10);
lift(LIFT1);
}
void drawZero(float bx, float by) {
drawTo(bx + 6, by + 3);
lift(LIFT0);
bogenGZS(bx + 3.5, by + 5, 5, -0.8, 6.7, 0.5);
lift(LIFT1);
}
void lift(int lift) {
if (servoLift >= lift) {
while (servoLift >= lift) {
servoLift--;
servo_lift.writeMicroseconds(servoLift);
delayMicroseconds(LIFT_SPEED);
}
}
else {
while (servoLift <= lift) {
servoLift++;
servo_lift.writeMicroseconds(servoLift);
delayMicroseconds(LIFT_SPEED);
}
}
}
void bogenUZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = -0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) > ende);
}
void bogenGZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = 0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) <= ende);
}
void drawTo(double pX, double pY) {
double dx, dy, c;
int i;
// dx dy of new point
dx = pX - lastX;
dy = pY - lastY;
//path lenght in mm, times 4 equals 4 steps per mm
c = floor(7 * sqrt(dx * dx + dy * dy));
if (c < 1) c = 1;
for (i = 0; i <= c; i++) {
// draw line point by point
set_XY(lastX + (i * dx / c), lastY + (i * dy / c));
}
lastX = pX;
lastY = pY;
}
double return_angle(double a, double b, double c) {
// cosine rule for angle between c and a
return acos((a * a + c * c - b * b) / (2 * a * c));
}
void set_XY(double Tx, double Ty) {
delay(1);
double dx, dy, c, a1, a2, Hx, Hy;
// calculate triangle between pen, servoLeft and arm joint
// cartesian dx/dy
dx = Tx - O1X;
dy = Ty - O1Y;
// polar lemgth (c) and angle (a1)
c = sqrt(dx * dx + dy * dy); //
a1 = atan2(dy, dx); //
a2 = return_angle(L1, L2, c);
//Serial.print("servo_left:");
//Serial.println(empty_places);
servo_left.writeMicroseconds(floor(((a2 + a1 - M_PI) * SERVO_LEFT_FACTOR) + SERVO_LEFT_NULL));
// calculate joinr arm point for triangle of the right servo arm
a2 = return_angle(L2, L1, c);
Hx = Tx + L3 * cos((a1 - a2 + 0.621) + M_PI); //36,5°
Hy = Ty + L3 * sin((a1 - a2 + 0.621) + M_PI);
// calculate triangle between pen joint, servoRight and arm joint
dx = Hx - O2X;
dy = Hy - O2Y;
c = sqrt(dx * dx + dy * dy);
a1 = atan2(dy, dx);
a2 = return_angle(L1, L4, c);
//Serial.print("servo_right:");
//Serial.println(floor(((a1 - a2) * SERVO_RIGHT_FACTOR) + SERVO_RIGHT_NULL));
servo_right.writeMicroseconds(floor(((a1 - a2) * SERVO_RIGHT_FACTOR) + SERVO_RIGHT_NULL));
}
void drawFrame() {
attachServos();
lift(LIFT2);
//===VERTICAL
//Go
drawTo(30, 10);
delay(500);
//Draw
lift(LIFT0);
drawTo(25, 50);
lift(LIFT2);
//Go
drawTo(47, 10);
delay(500);
//Draw
lift(LIFT0);
drawTo(45, 50);
lift(LIFT2);
//===HORIZONTAL
//Go
drawTo(10, 23);
//Draw
lift(LIFT0);
drawTo(60, 23);
lift(LIFT2);
//Go
drawTo(10, 35);
//Draw
lift(LIFT0);
drawTo(60, 35);
lift(LIFT2);
detachServos();
}
void goHome() {
//initial servo location
servo_lift.writeMicroseconds(800);
servo_left.writeMicroseconds(1633);
servo_right.writeMicroseconds(2289);
servo_lift.attach(LIFT_SERO_PIN);
servo_left.attach(LEFT_SERVO_PIN);
servo_right.attach(RIGHT_SERVO_PIN);
lift(LIFT2 - 100); // Lift all the way up.
drawTo(ERASER_X, ERASER_Y);
lift(LIFT0);
delay(500);
//lift(LIFT2);
detachServos();
}
void detachServos() {
servo_lift.detach();
servo_left.detach();
servo_right.detach();
}
void attachServos() {
servo_lift.attach(LIFT_SERO_PIN);
servo_left.attach(LEFT_SERVO_PIN);
servo_right.attach(RIGHT_SERVO_PIN);
}