Through a microcontroller, we can able to make robot run on specified path without human interference.
An RC robot which follows a specified path.
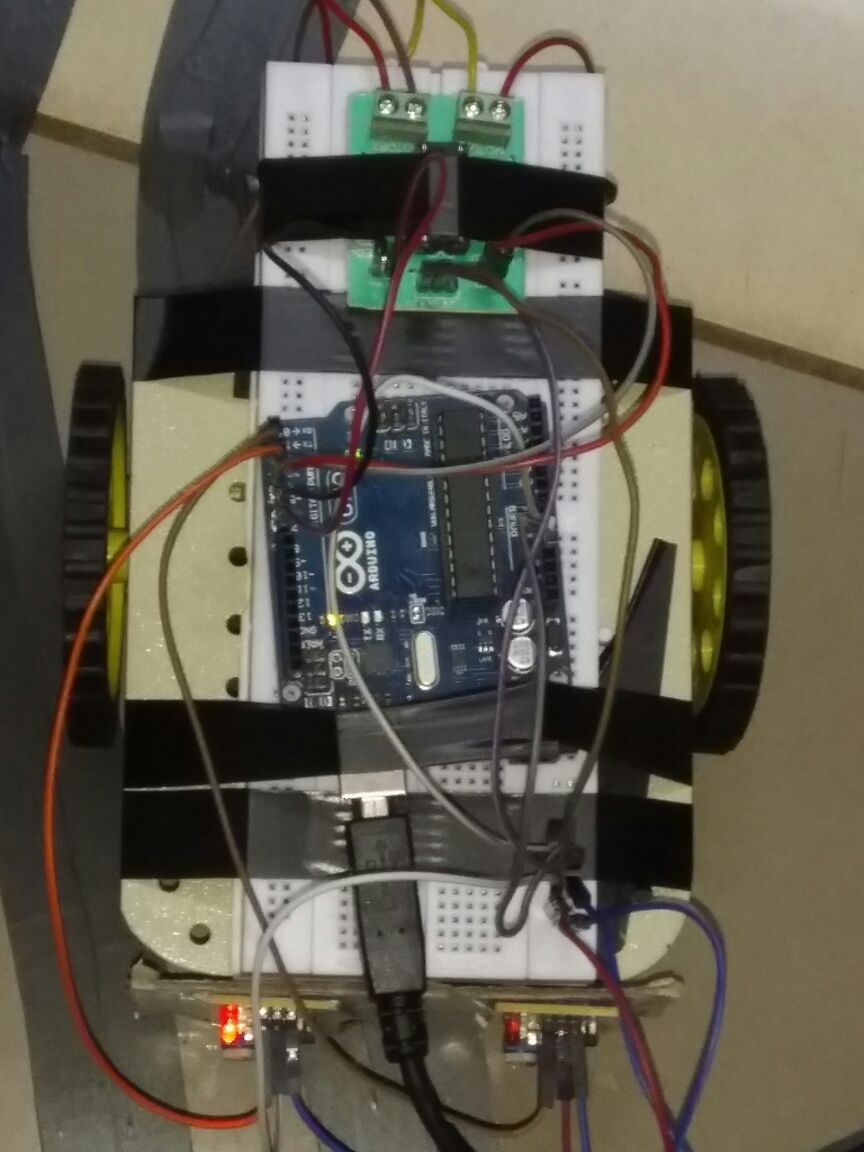
A microcontroller device which operates on certain program encoded in it. It follows black lines through sensors attached to its front side. In addition motors, battery, a motor driver jumper wires were used in making.
Software used: Arduino.exe ( Arduino UNO )
//Kumar Sparsh
//very simply written code
//code for Arduino line follower bot
#define LS 2
#define RS 3
#define LM1 5
#define LM2 4
#define RM1 7
#define RM2 6
void setup()
{
pinMode(LS,INPUT);
pinMode(RS,INPUT);
pinMode(LM1,OUTPUT);
pinMode(LM2,OUTPUT);
pinMode(RM1,OUTPUT);
pinMode(RM2,OUTPUT);
}
void loop()
{
if(digitalRead(LS) && digitalRead(RS))
{
digitalWrite(LM1,HIGH);
digitalWrite(LM2,LOW);
digitalWrite(RM1,HIGH);
digitalWrite(RM2,LOW);
}
if(digitalRead(LS) && !(digitalRead(RS)))
{
digitalWrite(LM1,HIGH);
digitalWrite(LM2,LOW);
digitalWrite(RM1,LOW);
digitalWrite(RM2,HIGH);
}
if(!(digitalRead(LS)) && digitalRead(RS))
{
digitalWrite(LM1,LOW);
digitalWrite(LM2,HIGH);
digitalWrite(RM1,HIGH);
digitalWrite(RM2,LOW);
}
if(!(digitalRead(LS)) && !(digitalRead(RS)))
{
digitalWrite(LM1,LOW);
digitalWrite(LM2,LOW);
digitalWrite(RM1,LOW);
digitalWrite(RM2,LOW);
}
}