/*
* ____ _ ______ _____ _____
/ __ \ | | | ____| __ \ | __ \
| | | |_ __ ___ _ __ | | | |__ | | | | | |__) |__ _ ___ ___
| | | | '_ \ / _ \ '_ \ | | | __| | | | | | _ // _` |/ __/ _ \
| |__| | |_) | __/ | | | | |____| |____| |__| | | | \ \ (_| | (_| __/
\____/| .__/ \___|_| |_| |______|______|_____/ |_| \_\__,_|\___\___|
| |
|_|
Open LED Race
An minimalist cars race for LED strip
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 3 of the License, or
(at your option) any later version.
by [email protected] for Arduino day Seville 2019
https://www.hackster.io/gbarbarov/open-led-race-a0331a
https://twitter.com/openledrace
https://gitlab.com/open-led-race
https://openledrace.net/open-software/
*/
//version Basic for PCB Rome Edition
// 2 Player , without Boxes Track
char const softwareId[] = "A2P0"; // A2P0: "A"=OpenLEDRace Team, "2P0"=Game ID (2P=2 Players, 0=Type 0 w slope w/ box)
char const version[] = "1.0.0";
#include <Adafruit_NeoPixel.h>
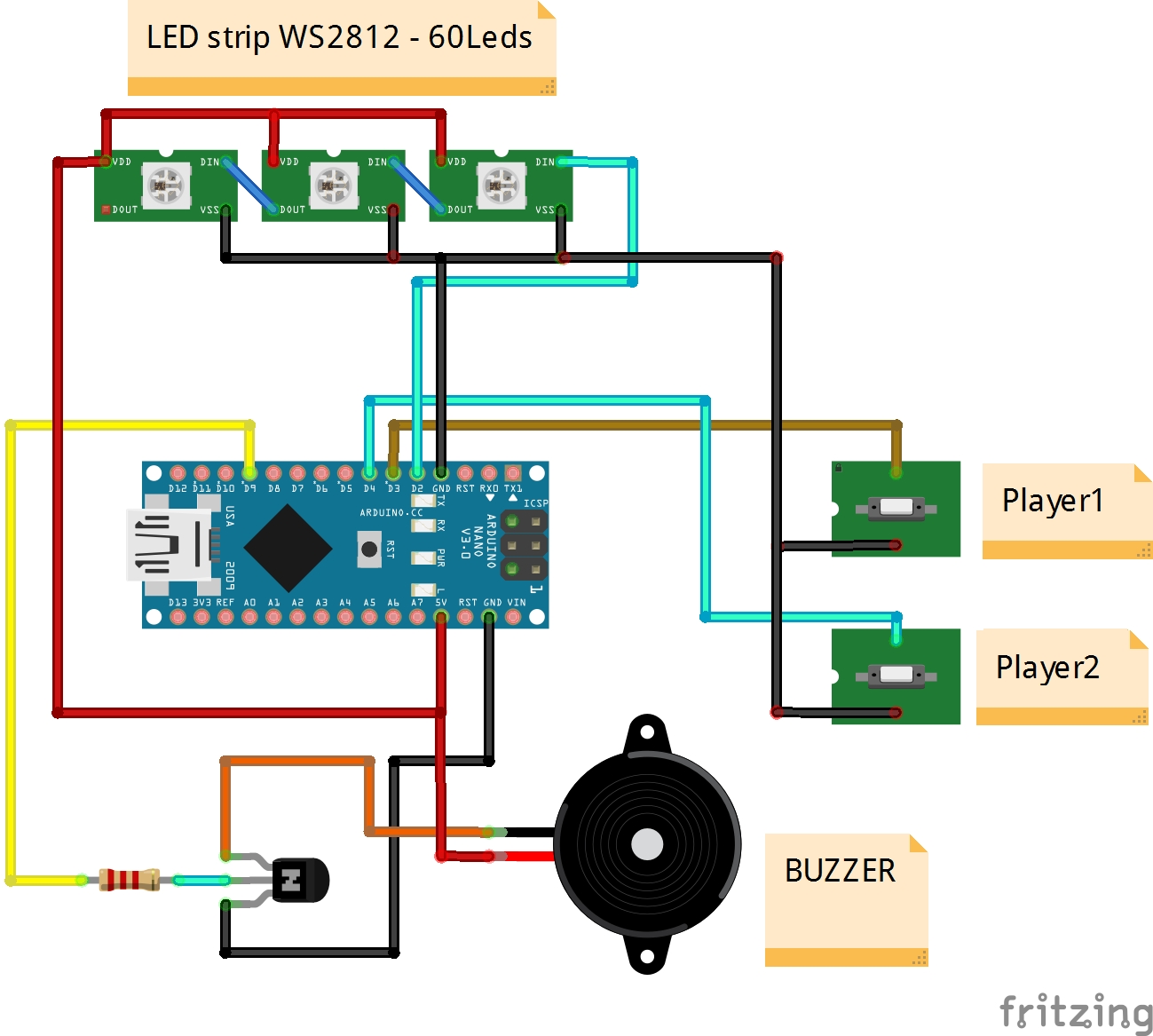
#define MAXLED 60 // MAX LEDs actives on strip
#define PIN_LED 2 // R 500 ohms to DI pin for WS2812 and WS2813, for WS2813 BI pin of first LED to GND , CAP 1000 uF to VCC 5v/GND,power supplie 5V 2A
#define PIN_P1 3 // switch player 1 to PIN and GND
#define PIN_P2 4 // switch player 2 to PIN and GND
#define PIN_AUDIO 9 // through CAP 2uf to speaker 8 ohms
#define INI_RAMP 80
#define MED_RAMP 90
#define END_RAMP 100
#define HIGH_RAMP 16
bool ENABLE_RAMP=0;
bool VIEW_RAMP=0;
int NPIXELS=MAXLED; // leds on track
int cont_print=0;
#define COLOR1 Color(255,0,0)
#define COLOR2 Color(0,255,0)
#define COLOR1_tail Color(i*3,0,0)
#define COLOR2_tail Color(0,i*3,0)
// Serial Communications
#define EOL '\n' // End of Command char used in Protocol
#define REC_COMMAND_BUFLEN 32
char cmd[REC_COMMAND_BUFLEN]; // Stores command received by ReadSerialComand()
#define TX_COMMAND_BUFLEN 64
char txbuff[TX_COMMAND_BUFLEN]; // to prepare command strings to send
int win_music[] = {
2637, 2637, 0, 2637,
0, 2093, 2637, 0,
3136
};
byte gravity_map[MAXLED];
int TBEEP=0;
int FBEEP=0;
byte SMOTOR=0;
float speed1=0;
float speed2=0;
float dist1=0;
float dist2=0;
byte loop1=0;
byte loop2=0;
byte leader=0;
byte loop_max=5; //total laps race
float ACEL=0.02;
float kf=0.015; //friction constant
float kg=0.003; //gravity constant
byte flag_sw1=0;
byte flag_sw2=0;
byte draworder=0;
unsigned long timestamp=0;
Adafruit_NeoPixel track = Adafruit_NeoPixel(MAXLED, PIN_LED, NEO_GRB + NEO_KHZ800);
int tdelay = 5;
void set_ramp(byte H,byte a,byte b,byte c)
{for(int i=0;i<(b-a);i++){gravity_map[a+i]=127-i*((float)H/(b-a));};
gravity_map[b]=127;
for(int i=0;i<(c-b);i++){gravity_map[b+i+1]=127+H-i*((float)H/(c-b));};
}
void set_loop(byte H,byte a,byte b,byte c)
{for(int i=0;i<(b-a);i++){gravity_map[a+i]=127-i*((float)H/(b-a));};
gravity_map[b]=255;
for(int i=0;i<(c-b);i++){gravity_map[b+i+1]=127+H-i*((float)H/(c-b));};
}
void setup() {
Serial.begin(115200);
for(int i=0;i<NPIXELS;i++){gravity_map[i]=127;};
track.begin();
pinMode(PIN_P1,INPUT_PULLUP);
pinMode(PIN_P2,INPUT_PULLUP);
if ((digitalRead(PIN_P1)==0)) //push switch 1 on reset for activate physics
{ENABLE_RAMP=1;
set_ramp(HIGH_RAMP,INI_RAMP,MED_RAMP,END_RAMP);
for(int i=0;i<(MED_RAMP-INI_RAMP);i++){track.setPixelColor(INI_RAMP+i, track.Color(24+i*4,0,24+i*4) );};
for(int i=0;i<(END_RAMP-MED_RAMP);i++){track.setPixelColor(END_RAMP-i, track.Color(24+i*4,0,24+i*4) );};
track.show();
delay(1000);
tone(PIN_AUDIO,500);delay(500);noTone(PIN_AUDIO);delay(500);
if ((digitalRead(PIN_P1)==0)) {VIEW_RAMP=1;} // if retain push switch 1 set view ramp
else {for(int i=0;i<NPIXELS;i++){track.setPixelColor(i, track.Color(0,0,0));};
track.show();
VIEW_RAMP=0;
};
};
if ((digitalRead(PIN_P2)==0)) {delay(1000); tone(PIN_AUDIO,1000);delay(500);noTone(PIN_AUDIO);delay(500);if ((digitalRead(PIN_P2)==1)) SMOTOR=1;} //push switch 2 until a tone beep on reset for activate magic FX ;-)
start_race();
}
void start_race(){send_race_phase(4); // Race phase 4: Countdown
for(int i=0;i<NPIXELS;i++){track.setPixelColor(i, track.Color(0,0,0));};
track.show();
delay(5000);
track.setPixelColor(12, track.Color(0,255,0));
track.setPixelColor(11, track.Color(0,255,0));
track.show();
tone(PIN_AUDIO,400);
delay(2000);
noTone(PIN_AUDIO);
track.setPixelColor(12, track.Color(0,0,0));
track.setPixelColor(11, track.Color(0,0,0));
track.setPixelColor(10, track.Color(255,255,0));
track.setPixelColor(9, track.Color(255,255,0));
track.show();
tone(PIN_AUDIO,600);
delay(2000);
noTone(PIN_AUDIO);
track.setPixelColor(9, track.Color(0,0,0));
track.setPixelColor(10, track.Color(0,0,0));
track.setPixelColor(8, track.Color(255,0,0));
track.setPixelColor(7, track.Color(255,0,0));
track.show();
tone(PIN_AUDIO,1200);
delay(2000);
noTone(PIN_AUDIO);
timestamp=0;
send_race_phase(5); // Race phase 4: Race Started
};
void winner_fx(byte w) {
int msize = sizeof(win_music) / sizeof(int);
for (int note = 0; note < msize; note++) {
if (SMOTOR==1) {tone(PIN_AUDIO, win_music[note]/(3-w),200);} else {tone(PIN_AUDIO, win_music[note],200);};
delay(230);
noTone(PIN_AUDIO);}
};
int get_relative_position1( void ) {
enum{
MIN_RPOS = 0,
MAX_RPOS = 99,
};
int trackdist = 0;
int pos = 0;
trackdist = (int)dist1 % NPIXELS;
pos = map(trackdist, 0, NPIXELS -1, MIN_RPOS, MAX_RPOS);
return pos;
}
int get_relative_position2( void ) {
enum{
MIN_RPOS = 0,
MAX_RPOS = 99,
};
int trackdist = 0;
int pos = 0;
trackdist = (int)dist2 % NPIXELS;
pos = map(trackdist, 0, NPIXELS -1, MIN_RPOS, MAX_RPOS);
return pos;
}
void print_cars_position( void ) {
int rpos = get_relative_position1();
sprintf( txbuff, "p%d%d%d,%d%c", 1, 1, loop1, rpos, EOL );
sendSerialCommand(txbuff);
rpos = get_relative_position2();
sprintf( txbuff, "p%d%d%d,%d%c", 2, 1, loop2, rpos, EOL );
sendSerialCommand(txbuff);
}
void burning1(){
//to do
}
void burning2(){
//to do
}
void track_rain_fx(){
//to do
}
void track_oil_fx(){
//to do
}
void track_snow_fx(){
//to do
}
void fuel_empty(){
//to do
}
void fill_fuel_fx(){
//to do
}
void in_track_boxs_fx(){
//to do
}
void pause_track_boxs_fx(){
//to do
}
void flag_boxs_stop(){
//to do
}
void flag_boxs_ready(){
//to do
}
void draw_safety_car(){
//to do
}
void telemetry_rx(){
//to do
}
void telemetry_tx(){
//to do
}
void telemetry_lap_time_car1(){
//to do
}
void telemetry_lap_time_car2(){
//to do
}
void telemetry_record_lap(){
//to do
}
void telemetry_total_time(){
//to do
}
int read_sensor(byte player){
return(0); //to do
}
int calibration_sensor(byte player){
return(0); //to do
}
int display_lcd_laps(){
return(0); //to do
}
int display_lcd_time(){
return(0); //to do
}
void draw_car1(void){for(int i=0;i<=loop1;i++){track.setPixelColor(((word)dist1 % NPIXELS)+i, track.COLOR1);};
}
void draw_car2(void){for(int i=0;i<=loop2;i++){track.setPixelColor(((word)dist2 % NPIXELS)+i, track.COLOR2);};
}
void loop() {
// look for commands received on serial
checkSerialCommand();
for(int i=0;i<NPIXELS;i++){track.setPixelColor(i, track.Color(0,0,0));};
if ((ENABLE_RAMP==1) && ( VIEW_RAMP==1)) {for(int i=0;i<(MED_RAMP-INI_RAMP);i++){track.setPixelColor(INI_RAMP+i, track.Color(24+i*4,0,24+i*4) );};
for(int i=0;i<(END_RAMP-MED_RAMP);i++){track.setPixelColor(END_RAMP-i, track.Color(24+i*4,0,24+i*4) );};
};
if ( (flag_sw1==1) && (digitalRead(PIN_P1)==0) ) {flag_sw1=0;speed1+=ACEL;};
if ( (flag_sw1==0) && (digitalRead(PIN_P1)==1) ) {flag_sw1=1;};
if ((gravity_map[(word)dist1 % NPIXELS])<127) speed1-=kg*(127-(gravity_map[(word)dist1 % NPIXELS]));
if ((gravity_map[(word)dist1 % NPIXELS])>127) speed1+=kg*((gravity_map[(word)dist1 % NPIXELS])-127);
speed1-=speed1*kf;
if ( (flag_sw2==1) && (digitalRead(PIN_P2)==0) ) {flag_sw2=0;speed2+=ACEL;};
if ( (flag_sw2==0) && (digitalRead(PIN_P2)==1) ) {flag_sw2=1;};
if ((gravity_map[(word)dist2 % NPIXELS])<127) speed2-=kg*(127-(gravity_map[(word)dist2 % NPIXELS]));
if ((gravity_map[(word)dist2 % NPIXELS])>127) speed2+=kg*((gravity_map[(word)dist2 % NPIXELS])-127);
speed2-=speed2*kf;
dist1+=speed1;
dist2+=speed2;
if (dist1>dist2) {if (leader==2) {FBEEP=440;TBEEP=10;}
leader=1;}
if (dist2>dist1) {if (leader==1) {FBEEP=440*2;TBEEP=10;}
leader=2;};
if (dist1>NPIXELS*loop1) {loop1++;TBEEP=10;FBEEP=440;};
if (dist2>NPIXELS*loop2) {loop2++;TBEEP=10;FBEEP=440*2;};
if (loop1>loop_max) {sprintf( txbuff, "w1%c", EOL );
sendSerialCommand(txbuff); // Send Winner=1 command
for(int i=0;i<NPIXELS/10;i++){track.setPixelColor(i,track.COLOR1_tail);}; track.show();
winner_fx(1);loop1=0;loop2=0;dist1=0;dist2=0;speed1=0;speed2=0;timestamp=0;
start_race();
}
if (loop2>loop_max) {sprintf( txbuff, "w2%c", EOL );
sendSerialCommand(txbuff); // Send Winner=2 command
for(int i=0;i<NPIXELS/10;i++){track.setPixelColor(i, track.COLOR2_tail);}; track.show();
winner_fx(2);loop1=0;loop2=0;dist1=0;dist2=0;speed1=0;speed2=0;timestamp=0;
start_race();
}
if ((millis() & 512)==(512*draworder)) {if (draworder==0) {draworder=1;}
else {draworder=0;}
};
if (abs(round(speed1*100))>abs(round(speed2*100))) {draworder=1;};
if (abs(round(speed2*100))>abs(round(speed1*100))) {draworder=0;};
if ( draworder==0 ) {
draw_car1();
draw_car2();
}
else {
draw_car2();
draw_car1();
}
track.show();
if (SMOTOR==1) tone(PIN_AUDIO,FBEEP+int(speed1*440*2)+int(speed2*440*3));
delay(tdelay);
if (TBEEP>0) {TBEEP--;} else {FBEEP=0;};
cont_print++;
if (cont_print>100) {print_cars_position();cont_print=0;}
}
/*
*
*/
void checkSerialCommand(){
int clen = checkSerial(cmd);
if(clen == 0) return ; // No commands received
if(clen < 0) { // Error receiving command
sprintf( txbuff, "!1Error reading serial command:[%d]",clen); // Send a warning to host
sendSerialCommand(txbuff);
return;
}
// clen > 0 ---> Command with length=clen ready in cmd[]
switch (cmd[0]) {
case '#': // Handshake -> send back
{
sprintf( txbuff, "#%c", EOL );
sendSerialCommand(txbuff);
}
return;
case '@' : // Enter "Configuration Mode"
{
// send back @OK
// No real cfg mode here, but send @OK so the Desktop app (Upload, configure)
// can send a GET SOFTWARE Type/Ver command and identify this software
sprintf( txbuff, "@OK%c", EOL );
sendSerialCommand(txbuff);
}
return;
case '?' : // Get Software Id
{
sprintf( txbuff, "%s%s%c", "?", softwareId, EOL );
sendSerialCommand(txbuff);
}
return;
case '%' : // Get Software Version
{
sprintf( txbuff, "%s%s%c", "%", version, EOL );
sendSerialCommand(txbuff);
}
return;
}
// if we get here, the command it's not managed by this software -> Answer <CommandId>NOK
sprintf(txbuff, "%cNOK%c", cmd[0], EOL );
sendSerialCommand(txbuff);
return;
}
/*
*
*/
void send_race_phase( int phase ) {
sprintf(txbuff, "R%d%c",phase,EOL);
sendSerialCommand(txbuff);
}
// Command Send/Receive base functions
///////////////////////////////////////
// vars used only in these functions
Stream* _stream = &Serial;
int _bufIdx;
/* Non blocking: call these function in main loop()
*
* If there are bytes available in Serial, READ JUST ONE char
* and ADD it to the 'internal' cmd buffer
* The char just read is an END OF COMMAND char ?
* N: Return 0 (no complete command available yet)
* Y: Return buffer length (the caller will find the command in [buf]
*/
int checkSerial(char * buf) {
while (_stream->available()) {
if(_bufIdx < REC_COMMAND_BUFLEN - 2) {
char data = _stream->read();
if(data == EOL) {
int cmsSize=_bufIdx;
buf[_bufIdx++] = '\0';
_bufIdx=0;
return(cmsSize);
} else {
buf[_bufIdx++] = data;
}
} else {
// buffer full
// reset and retunn error
buf[_bufIdx++] = '\0';
_bufIdx=0;
return(-2);
}
}
return(0);
}
/*
*
*/
void sendSerialCommand(char* str) {
// get command length
int dlen=0;
for(; dlen<TX_COMMAND_BUFLEN; dlen++ ) {
if(*(str+dlen) == EOL ) {
dlen++; // send EOC
break;
}
}
_stream->write(str, dlen);
return;
}