Introduction
According to National Crime Records Bureau (NCRB), it is estimated that more than 1.2 lakh deaths have been caused because of fire accidents in India from 2010-2014. Even though there are a lot of precautions taken for Fire accidents, these natural/man-made disasters do occur now and then. In the event of a fire breakout, to rescue people and to put out the fire we are forced to use human resources which are not safe. With the advancement of technology especially in Robotics it is very much possible to replace humans with robots for fighting the fire. This would improve the efficiency of firefighters and would also prevent them from risking human lives. Today we are going to build a Fire Fighting Robot using Arduino, which will automatically sense the fire and start the water pump
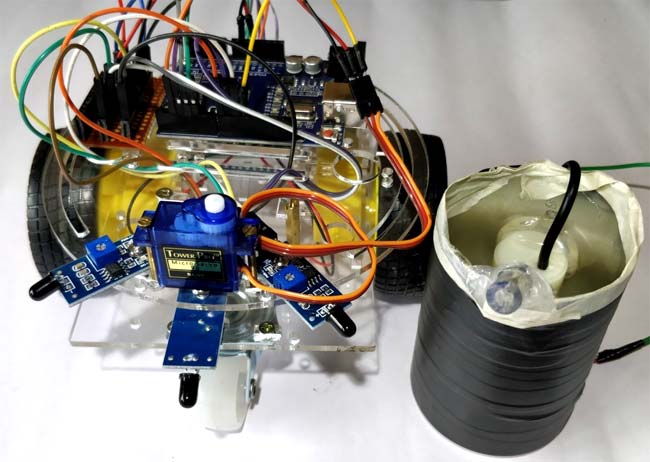
In this project, we will learn how to build a simple robot using Arduino that could move towards the fire and pump out water around it to put down the fire. It is a very simple robot that would teach us the underlying concept of robotics; you would be able to build more sophisticated robots once you understand the following basics. So let’s get started...
BACKGROUND AND RELATED WORK:
W. Burgard and M. Moors [1] proposed that the single maps generates for each robot are more accurate than map generated by odometry data. When a robot detects another, send its processed map and the master robot can generates a global map very accurate. This way, time necessary to build the global map is reduced. They focused on presenting a multi-robot mapping and localization system. Learning maps and efficient exploration of unknown environment is a fundamental problem in mobile robotics usually called SLAM (simultaneous localization and mapping problem). Guzzoni [2] focuses the fire sources and programs escaping path using mobile robots for intelligent building, and presents the movement scenario in the experimental platform. The mobile robot has the shape of cylinder and its diameter, height and weight is 10cm, 18cm and 1.5kg. The controller of the mobile robot is MCS-51 microchip, and acquires the detection signals from flame sensor and reflecting IR sensors, and receives the control command from the supervised compute via wireless RF interface. The mobile robot searches fire sources and obstacles moving in the experimental platform autonomously, and transmits the locations of the detected fire sources and obstacles to the supervised computer, too. The supervised computer uses Gauss probability distribution function to compute the risk values around the fire location, and uses Bayesian estimation algorithm to calculate the total risk values of each location of the experimental platform. We proposed A* searching algorithm to program escaping paths according to the risk distribution of each cross point in the platform. Y. Cao [3] focuses on systems composed of multiple autonomous mobile robots exhibiting cooperative behaviour. Groups of mobile robots are constructed, with an aim to studying such issues as group architecture, resource conflict, origin of cooperation, learning, and geometric problems. As yet, few applications of cooperative robotics have been reported, and supporting
Working Concept of Fire Fighting Robot:
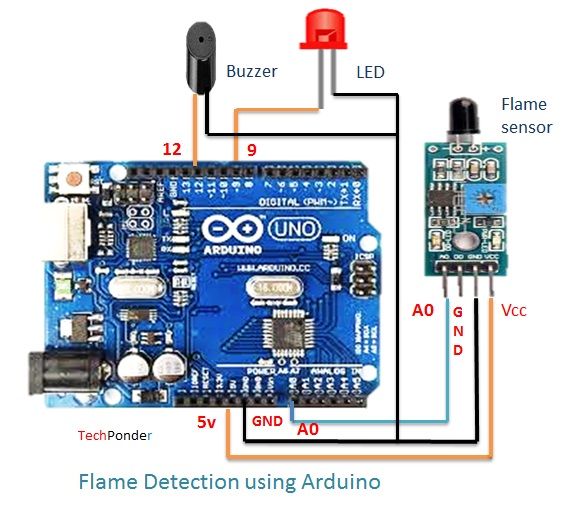
The main brain of this project is the Arduino, but in-order to sense fire we use the Fire sensor module (flame sensor) that is shown below.
As you can see these sensors have an IR Receiver (Photodiode) which is used to detect the fire. How is this possible? When fire burns it emits a small amount of Infra-red light, this light will be received by the IR receiver on the sensor module. Then we use an Op-Amp to check for change in voltage across the IR Receiver, so that if a fire is detected the output pin (DO) will give 0V(LOW) and if the is no fire the output pin will be 5V(HIGH).
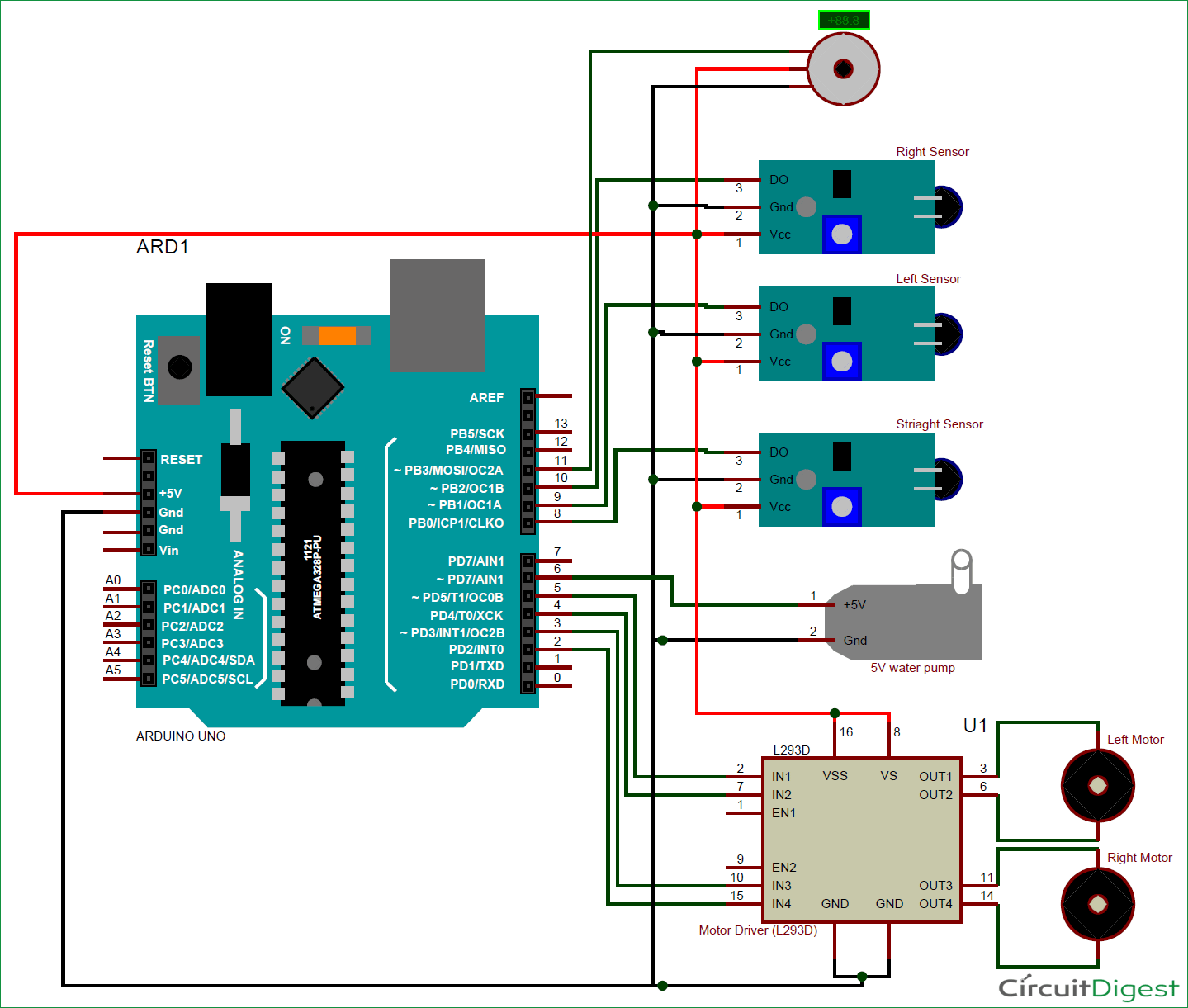
So, we place three such sensors in three directions of the robot to sense on which direction the fire is burning.
/*------ Arduino Fire Fighting Robot Code----- */
#include <Servo.h>
Servo myservo;
int pos = 0;
boolean fire = false;
/*-------defining Inputs------*/
#define Left_S 9 // left sensor
#define Right_S 10 // right sensor
#define Forward_S 8 //forward sensor
/*-------defining Outputs------*/
#define LM1 2 // left motor
#define LM2 3 // left motor
#define RM1 4 // right motor
#define RM2 5 // right motor
#define pump 6
void setup()
{
pinMode(Left_S, INPUT);
pinMode(Right_S, INPUT);
pinMode(Forward_S, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(pump, OUTPUT);
myservo.attach(11);
myservo.write(90);
}
void put_off_fire()
{
delay (500);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
digitalWrite(pump, HIGH); delay(500);
for (pos = 50; pos <= 130; pos += 1) {
myservo.write(pos);
delay(10);
}
for (pos = 130; pos >= 50; pos -= 1) {
myservo.write(pos);
delay(10);
}
digitalWrite(pump,LOW);
myservo.write(90);
fire=false;
}
void loop()
{
myservo.write(90); //Sweep_Servo();
if (digitalRead(Left_S) ==1 && digitalRead(Right_S)==1 && digitalRead(Forward_S) ==1) //If Fire not detected all sensors are zero
{
//Do not move the robot
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Forward_S) ==0) //If Fire is straight ahead
{
//Move the robot forward
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
fire = true;
}
else if (digitalRead(Left_S) ==0) //If Fire is to the left
{
//Move the robot left
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Right_S) ==0) //If Fire is to the right
{
//Move the robot right
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
delay(300); //Slow down the speed of robot
while (fire == true)
{
put_off_fire();
}
}
Flame Detection Using Arduino
The complete working of the robot can be found at the video given below. The maximum distance to which the fire can be detected depends on the size of the fire, for a small matchstick the distance is relatively less. You can also use the potentiometers on top of the modules to control the sensitivity of the robot. I have used a power bank to power the robot you can use a battery or even power it with a 12V battery.
Hope you understood the project and would enjoy building something similar. If you have any problems in getting this build, use the comment section below to post your quires or use the forums for technical help.